Anticipation in Social Systems
Loet Leydesdorff[1] & Daniel Dubois[2]
Abstract
In social systems, meaning can be communicated in addition to—and on top of—underlying processes of the information exchange. Meaning processing incurs on information processing with hindsight, while information processing proceeds recursively following the time axis. It can be shown that the sole assumption of social relatedness as a variable among groups of agents provides sufficient basis for deriving the logistic map as a first-order approximation of the social system. The anticipatory formulation of this equation can then be derived for both anticipation in the interaction term and in the aggregation among subgroups. Using this formula in a cellular automaton, an observer can be generated as a reflection of the system under observation. Different observers are also able to observe one another’s observations. The social system of interactions among observations can sometimes improve on the representations entertained by each of the individually observing systems.
1. Introduction
Rosen (1985) defined an anticipatory system as a system that contains a model of the system itself. For example, a biological system can use this internal representation for anticipatory adaptation, that is, to predict the survival value of the system among its possible manifestations at a next moment in time. Dubois (2000) distinguished between weak anticipation, that is, when systems use a model of themselves for computing future states, and strong anticipation, that is, when the system uses itself for the construction of its future states. In the latter case anticipation is no longer similar to prediction.
In this paper we argue that the social system can be considered as anticipatory in the strong sense: this system constructs its future by providing the expected information content of the distribution of events with meaning. The anticipations can be communicated among the agents in a next-order network that feeds back on the information-processing network. However, meaning is provided with hindsight (that is, a posteriori), and therefore meaning processing also feeds back on the time axis within the system (Luhmann, 1984; Leydesdorff, 2001a).
The meaning processing thus adds a reflexive layer of communication to the information processing in social systems. (The interaction between these two layers then produces meaningful information.) While the historical configurations of social systems change in a forward mode in terms of both uncertainty and meaningful information, the information processing is internally subject to reflections ex post. The meaning processing reduces the uncertainty contained in the distributions of first-order networks locally.
Figure 1. The incursive processing of meaning interacts with the recursive processing of information and the result is the localized production of meaningful information
Providing information with meaning can be considered as a selective operation. Some uncertainty in the information processing is discarded as noise, and other uncertainty is identified as ‘meaningful information.’ Thus, the meaning processing structures the information processing. Meaning processing continuously reflects on the system of information processing under observation. The two processes can be considered ‘structurally coupled’ (Maturana, 1978): at the level of the social system the one process cannot operate without the other. Biological systems can provide meaning to information, but cannot exchange the meanings thus generated among themselves.[3]
The reflections provide us with mirror images, but from potentially different perspectives. When the reflections can again be communicated, they are recursively built into the historical (that is, forward) development of the social system. The exchange of meaning adds globally to the information processing by distinguishing the meaningful information from the noise in terms relevant for the reproduction of the social system (Urry, 2003). Each communication leads to new communications, and thus the social system continuously reconstructs the order of expectations from a hindsight perspective by operating on the layers that it has generated historically.
The purpose of this paper is: (1) to model the social as a system containing strong anticipation, (2) to prove the equations, and (3) to show how this system works by using simulations. In the next section, we first derive the anticipatory formulation of the logistic equation for aggregation and interaction among subgroups of the social system. Using these algorithms, simulations enable us subsequently to generate a reflexive observer within an information-processing system. Cellular automata will be used for the visualization of how social systems operate (Leydesdorff, 2001b and 2002).
2. The specification of a social system
The double-layeredness of the operation of a social system processing both information historically and meaning with hindsight can be described by using the incursive formulation of the logistic map as proposed by Dubois (1998):
x(t) = a x(t-1) {1 – x(t)} (1a)
or: x(t+1) = a x(t) {1 – x(t+1)} (1b)
For example, the price of a commodity can be considered as its expected value on the market. The price codifies the value of a commodity in economic terms. The anticipatory formulation of the logistic curve appreciates that the price has both on an intrinsic value and is reflected in a feedback of the market system. The intrinsic factor stems from the historical production process, while the feedback from the market originates in the present on the basis of the dynamics of current supply and demand.
The use of the traditional—that is, only forward—format of this equation is ill-advised, since the two subdynamics of production and diffusion are then not sufficiently distinguished in terms of the dynamics over time. Production proceeds historically along the time axis—for example, building on previous generations of a technology—while diffusion takes place under competitive conditions in the present. The selection mechanism (that is, the market) can thus be considered as an evolutionary feedback on the historical development (Andersen, 1994; Leydesdorff & Van den Besselaar, 1998; Nelson & Winter, 1982).
The techno-economic system can be modeled using this anticipatory version of the logistic equation. The recursion on x(t-1) in the left-hand term of Equation 1a represents the axis of historical development of the technology. The system additionally selects in the present upon the development as declared in the right-hand term of the equation. The selection pressure prevailing in the present is analytically independent of the previous state of the system that produced the variation. Thus, the two mechanisms interact as subdynamics of the social system.
2.1 The definition of a social system
Let us first consider two groups y and x in a social system. The behavior of these groups can be described by the following equations:
dy(t)/dt = – ax(t)y(t) + bx(t) (2a)
dx(t)/dt = + ax(t)y(t) – bx(t) (2b)
Let us furthermore assume that x(t) + y(t) = Constant = C; for example, C = 1. The parameter b can also be taken as b = 1, without losing any generality.
The sociological interpretation of this system of equations is as follows: the two groups x(t) and y(t) interact with an interaction given by the product of the two populations x(t)y(t) at the rate a. The parameter a can be interpreted as a probabilistic interaction. The interaction between the two groups x and y can be considered as the sociability factor of the population.
For example, the group y may represent isolated persons, and the group x persons entertaining relations with each other. For a = 0, x(t) becomes zero and the whole population is constituted of isolated persons; y(t) is in this case equal to 1 because x + y = 1. The parameter a can thus be considered as a measure of the sociability of the population (cf. Dubois & Sabatier, 1998).
2.2 Derivation of the logistic equation
Assuming b = 1 in Equations 2a and 2b, the corresponding discrete system can be formulated as follows:
y(t+1) = y(t) – ax(t)y(t) + x(t) (3a)
x(t+1) = x(t) + ax(t)y(t) – x(t) = ax(t)y(t) (3b)
Because
y(t+1) + x(t+1) = y(t) + x(t) = Constant = 1 (4a)
y(t) = 1 – x(t) (4b)
The logistic map is obtained by replacing Equation 4b into Equation 3b:
x(t+1) = ax(t)(1 – x(t))
As is well known, this model generates chaotic behavior for a = 4.
2.3 The anticipatory version of the model
One can consider two anticipatory versions of the above model in the case of a social system. First, one may expect the grouping process itself to contain anticipation. For example, isolated individuals may consider whether it is to their advantage to enter into relations. Second, one can assume that the interaction term between the two groups x and y contains anticipation. We will now first prove that both assumptions lead to the anticipatory version of the logistic map as specified above in Equation 1b.
2.3.1 Anticipation in the development of y
In general, the anticipatory model is an analytical result of the backward evaluation of the differential equation in discrete time:
x(t – Δt) = x(t) – Δt f(x(t)) (5)
Applied to Equation 3a this leads to the following model:
y(t+1) = y(t) – ax(t+1)y(t+1) + x(t+1) (6a)
In this model, y—that is, the grouping of isolated persons—contains anticipation since the term is operating upon both its previous and its present state at the same time. Without the further assumption of anticipation in the interaction (see the next section), the development of x(t) remains unchanged (as in Equation 3b):
x(t+1)=x(t) + ax(t)y(t) – x(t) = ax(t)y(t) (6b)
Because of the anticipation in y, however, y in this case relates to the next state of x, and therefore:
y(t) + x(t+1) = Constant = 1
y(t) = 1 – x(t+1) (7)
By putting Equation 7 into 6b, one obtains:
x(t+1) = ax(t)(1 – x(t+1)) (8)
Q.e.d.
2.3.2 Incursion in the interaction between x with y
Let us now assume that the interaction term between x and y contains the source of anticipation:
y(t+1) = y(t) – ax(t)y(t+1) + x(t) (9a)
x(t+1) = x(t) + ax(t)y(t+1) – x(t) = ax(t)y(t+1) (9b)
For analytical reasons, one can also write the interaction term as a difference equation in relation to its previous state, as follows:
x(t)y(t+1) = x(t)y(t) + x(t){y(t+1) – y(t)} (10a)
y(t+1) = y(t) + {y(t+1) – y(t)} (10b)
In other words, the anticipatory interaction depends on a supplementary factor given by the derivative of y. Since both terms are thus implied in the anticipation:
y(t+1) + x(t+1) = Constant = 1
and therefore:
y(t+1) = 1 – x(t+1) (11)
By replacing Equation 11 into Equation 9b, one obtains again:
x(t+1) = ax(t){1 – x(t+1)} (12)
Q.e.d.
In summary, the introduction of anticipation into a very basic model of the social system can be shown to lead to the anticipatory formulation of the logistic equation. First, we argued for using this equation on theoretical grounds, and in this section we have derived this model of the social system from assumptions about the possible contingencies between two subpopulations (Parsons, 1968).
3. The simulations
Social systems are based on exchange relations. In other words, social systems are distributed by their very nature. Cellular automata enable us to display the dynamics of multi-agent systems in terms of colours on the screen. Each point (x, y) on the screen can be considered as an agent which relates—or not—to other agents. Different colours can be used to indicate the phenotypical state of the various agents over time. In addition to this visualization, the value of each pixel can be mapped for computational purposes in an array (x, y) with the size of the screen.
In order to enhance the transparency, we formulate the simulation models in standard BASIC.[4] For example, the array is defined in line 40 of Table 1 so that it can contain a representation of the screen in CGA-mode (200 x 320 pixels). The CGA-mode (line 10) was chosen in order to take full advantage of the visibility of the effects on the screen. A pixel—representing an agent—is selected randomly in lines 110 and 120.
|
1 CLS : LOCATE 10, 10: INPUT 'Parameter value'; a 2 IF a > 4 THEN a = 4 ' prevention of overflow
10 SCREEN 7: WINDOW (0, 0)-(320, 200): CLS 20 RANDOMIZE TIMER 30 ' $DYNAMIC 40 DIM scrn(321, 201) AS SINGLE 50 FOR x = 0 TO 320 60 FOR y = 0 TO 200 70 scrn(x, y) = .1: PSET (x, y), (10 * scrn(x, y)) 80 NEXT y 90 NEXT x
100 DO 110 x = INT(RND * 320) 120 y = INT(RND * 200) 130 IF y > 100 GOTO 140 ELSE GOTO 150 ' split of screens 140 scrn(x, y) = a * scrn(x, y) / (1 + a * scrn(x, y)): GOTO 160 150 scrn(x, y) = a * scrn(x, y) * (1 - scrn(x, y)) 160 PSET (x, y), (10 * scrn(x, y)) 170 LOOP WHILE INKEY$ = '' 180 END |
|
Table 1. Incursion and recursion in lines 140 and 150, respectively. |
On the assumption that a social system contains the two layers of information and meaning processing, we use the logistic equation in the forward mode for the historical information processing, and in the anticipatory formulation for providing meaning to the information processing. In the program (Table 1) and the corresponding Figure 1, the screen is accordingly split into two halves (line 130).
In the lower half, the results of the logistic evaluation of the corresponding array value (line 150) are brought to the screen in line 160. In the upper half, the anticipatory version of the logistic equation is used for the evaluation, and the result of this evaluation is also depicted in line 160. The analytical rewrite of the logistic equation in the format used in line 140 is provided in Table 2 (Dubois, 1998). The code in the first line enables the user to choose the parameter value for a interactively.[5]
|
x(t) = ax(t-1)(1 – x(t)) (1a) x(t) = ax(t-1) – ax(t-1) x(t) x(t) + ax(t-1) x(t) = ax(t-1) x(t)(1 + ax(t-1)) = ax(t-1) x(t) = ax(t-1) / (1 + ax(t-1)) |
|
Table 2. Analytical rewrite of the anticipatory formulation of the logistic equation. |
Figure 2 shows that the incursive simulation leads to a transition, while the representation of the recursive system in the lower half of the screen exhibits the bifurcation as expected for the value of a = 3.1. The incursive model converges to a stable state (in this case, exhibited as white) because the Limx→∞ {ax/(1+ax)} = 1.
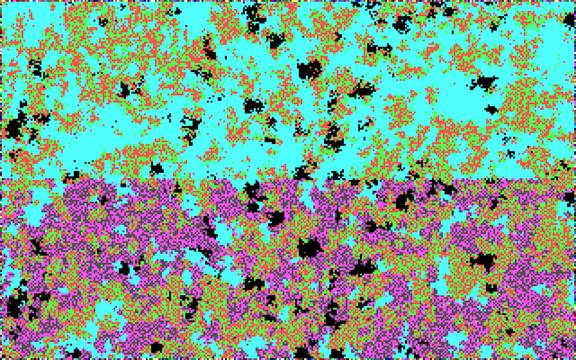
In the next simulation (Table 3) we combine the two subdynamics of incursion and recursion into one single screen. In this model the choice of the incursive or recursive routines is randomly assigned in line 130, but the screen and the array values are no longer split according to the value of the vertical coordinate.
|
[...] 100 DO 110 x = INT(RND * 320) 120 y = INT(RND * 200) 130 IF RND > .5 GOTO 140 ELSE GOTO 150 140 scrn(x, y) = a * scrn(x, y) / (1 + a* scrn(x, y)) : GOTO 160 150 scrn(x, y) = a * scrn(x, y) * (1 - scrn(x, y)) 160 PSET (x, y), (10 * scrn(x, y)) 170 LOOP WHILE INKEY$ = '' 180 END |
|
Table 3. Incursion and recursion alternating randomly, but using the same data set |
When the incursive model operates within a recursive system of which it is also a part, the incursive routine tends to reduce the uncertainty produced by the recursive one, since incursion drives towards a transition in the long run because of the noted limit. The transition is visible on screen as a trend toward a dominant colour, but this transition is not achieved because the incursive routine is continuously disturbed by the recursive one. The system therefore remains in transition.
Note that from an (historical) actor perspective the incursive transition operates as a latent attractor. The longer-term prevalence of incursion over recursion, however, demonstrates the importance of accounting for expectations in models of the evolution of social systems when both subdynamics can be expected to play a role in the system. The emerging layers of social coordination, that is, the communication of meaning, can be expected to provide additional stabilities because of the selective capacity of the implied coding.
For example, instantaneous selections can be selected recursively for historical stabilization over time. This occurs in processes like institutionalization. By using incursion and therefore time as another degree of freedom, some historical stabilization can be selected for meta-stabilization or globalization. This next-order level remains pending as selection pressure on the historical manifestation.
4. The generation of an observer
Can the result of the interacting dynamics of a complex system that contains both incursion and recursion also be decomposed into an observing and an observed sub-system? In the model exhibited in Table 4 and Figure 3, the two routines of ‘observed’ and ‘observing’ are decomposed so that an observer is generated by using the incursive routine.[6] The upper half of the screen is reserved for exhibiting the results of the incursive observations of the lower half of the screen, while the lower half is based on the recursive routines and therefore exhibits the historical development of the observed system.
In order to generate an observable structure at each moment in time, a network effect was added to the observed system (in lines 110-120 of Table 4). This network effect spreads the update in the lower-level screen in the local (Von Neumann) neighbourhood of the affected cell. (The Von Neumann environment is defined as the cells above, below, to the right, and to the left of the effect.) The network effect enables us to appreciate on the screen the development of both the observed system and the relative quality of the observation depicted in the upper half of the screen. Note that the network effect structures the system at each moment in time and locally, whereas incursion and recursion are defined over the time axis of the system, that is, as an operation at the system’s level.
Henceforth, we use the full range of 16 colours available in the BASIC palette in order to provide more details on the screen. This is achieved by changing the decimal base of the above simulations to the basis of 16 (in line 43 of Table 4). Whenever necessary normalizations of the formulas for incursion and recursion are added by dividing again by 16 (for example, in lines 90 and 100).
1 CLS: LOCATE 10, 10: 'Parameter value for the recursion (a)'; a 2 LOCATE 11, 10: 'Parameter value for the incursion (b)'; b 3 IF a > 4 THEN a = 4
10 SCREEN 7: WINDOW (0, 0)-(320, 200): CLS 11 LINE (1, 100)-(320, 100) 20 RANDOMIZE TIMER
30 ' $DYNAMIC 40 DIM scrn(321, 201) AS INTEGER 41 FOR x = 0 TO 320 42 FOR y = 0 TO 200 43 scrn(x, y) = INT(RND * 16) ' change to 16 colours 44 PSET (x, y), scrn(x, y) ' (see note 4) 45 NEXT y 46 NEXT x
50 DO 60 y = INT(RND * 200) 70 x = INT(RND * 320) 80 IF (x = 0 OR y = 0) GOTO 160 ' prevention of network errors 85 IF y > 100 GOTO 90 ELSE GOTO 100 90 scrn(x, y) = b * scrn(x, y-100) / (1 + b * (scrn(x, y-100) / 16)) 95 GOTO 140 ' paint upper screen 100 scrn(x, y) = a * (scrn(x, y) * (1 - (scrn(x, y)) / 16)) ' spread new value in the Von Neumann environment 110 scrn(x + 1, y) = scrn(x, y): scrn(x - 1, y) = scrn(x, y) 120 scrn(x, y + 1) = scrn(x, y): scrn(x, y - 1) = scrn(x, y) 140 PSET (x, y), ABS(scrn(x, y)) 160 LOOP WHILE INKEY$ = '' 170 END |
Whereas the incursive and the recursive routines operated on the same initial configurations as in the model provided in Table 3, the feedback relation between the two systems changes continuously in this model. In this model, the two parameters for recursion (a) and incursion (b) can also be varied independently. A random attribution is decisive (in line 85) for whether the recursive or the incursive routine is entered. However, the incursive routine (line 90) operates on the value of the corresponding array element in the lower half of the screen by evaluating scrn(x, y-100). The result of this evaluation is attributed to the upper half of the screen and to the corresponding array value of scrn(x, y). The effect is that an observer is generated as exhibited in Figure 3 (a = 3.2 and b = 3.2).
By changing the parameter of the incursion, one can change the window of observation of an observer. High values for the incursion parameter (b) drive the observing system into a more homogeneous state (because of the above noted limit transition in the formula), while higher values of the recursive parameter (a) drive the historically developing system towards more chaotic bifurcations.
5. Observing the observers
The possibility of generating observers with the different qualities of their respective observations raises the question of the possibility of interaction among the observers, for example, when the observers observe each other’s observations. Human observers can additionally interact by using more sophisticated mechanisms like a human language or symbolic media for the communication (Luhmann, 1982, 1997; Parsons, 1963a; 1963b). This further extension is the subject of a next study, but some expectations can be anticipated by showing the results of a single simulation.
Figure 4 exhibits the results of two observers with different parameters b and c observing the recursive development in the lower left screen (with parameter a). The two observers additionally observe each other’s observations, and the lower right quadrant is used for the exhibition of the results of interactive and aggregative combinations of these observations.
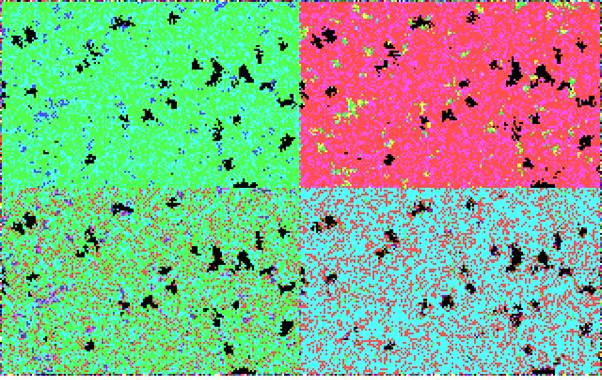
The lower right quadrant shows a representation of the observed system in the lower left quadrant that is richer in detail than either of the observations by the individual observers in the two upper-half quadrants. It should be remembered that the two incursive observers operate at random frequencies with different parameters. Consequently, an interaction among the observations contains a dynamic uncertainty that may represent elements of the originally observed system which are lost in the individual reflections, while the latter focus on the observable structure and thus reduce the complexity. The aggregation or averaging of the different observations can be expected to lead to uncertainty in the delineations at each moment in time; the interaction of the reflections opens a phase space of possible reconstructions of the observed system.
6. Conclusions
We have argued that the social system can be considered as an anticipatory system in the strong sense of constructing its own future. It does so by reconstructing its past in the present. Because this reconstruction is functional to the progressive development of this system, the system can be expected to differentiate increasingly and a manifold of meanings can be entertained. The ones which are again selected, are circulated as information in a system that thus remains under continuous reconstruction.
The exchange processes of meaning constitute a layer on top of the historical exchanges of information. This double layered process was modeled using the traditional (recursive) formulation of the logistic map for the historical process and the anticipatory formulation for the evolutionary process that changes the historical process in a distributed mode.
The appropriateness of the approach was derived from the sole assumption of sociability in the social process. However, the agents should additionally be competent to communicate in terms of exchanging both meaning and uncertainty. Human language can perhaps be considered as the evolutionary achievement that enables us to entertain these communicative competences in relation to each other, but without the need for a harmonic resolution.
References
Andersen, E. S. (1994). Evolutionary Economics: Post-Schumpeterian Contributions. London: Pinter.
Dubois, D. M. (1998). Computing Anticipatory Systems with Incursion and Hyperincursion. In D. M. Dubois (Ed.), Computing Anticipatory Systems, CASYS – First International Conference (Vol. 437, pp. 3-29). Woodbury, NY: American Institute of Physics.
Dubois, D. M. (2000). Review of Incursive, Hyperincursive and Anticipatory Systems -- Foundation of Anticipation in Electromagnetism. In D. M. Dubois (Ed.), Computing Anticipatory Systems CASYS'99 (Vol. 517, pp. 3-30). Woodbury, NY: Amercian Institute of Physics.
Dubois, D. M., and Ph. Sabatier, Morphogenesis by Diffuse Chaos in Epidemiological Systems, In D. M. Dubois (Ed.), Computing Anticipatory Systems CASYS – First International Conference (Vol. 437, pp.295-308). Woodbury, NY: Amercian Institute of Physics.
Leydesdorff, L. (2000). Luhmann, Habermas, and the Theory of Communication. Systems Research and Behavioral Science, 17, 273-288.
Leydesdorff, L. (2001a). A Sociological Theory of Communication: The Self- Organization of the Knowledge-Based Society. Parkland, FL: Universal Publishers; at <http://www.upublish.com/books/leydesdorff.htm >.
Leydesdorff, L. (2001b). Technology and Culture: The Dissemination and the Potential 'Lock-in' of New Technologies. Journal of Artificial Societies and Social Simulation, 4(3), Paper 5, at <http://jasss.soc.surrey.ac.uk/4/3/5.html>.
Leydesdorff, L. (2002). The Complex Dynamics of Technological Innovation: A Comparison of Models Using Cellular Automata. Systems Research and Behavioral Science, 19(6), 563-575.
Leydesdorff, L., & P. v. d. Besselaar. (1998). Technological Development and Factor Substitution in a Non-Linear Model. Journal of Social and Evolutionary Systems, 21, 173-192.
Luhmann, N. (1982). Liebe als Passion. Frankfurt a.M.: Suhrkamp.
Luhmann, N. (1984). Soziale Systeme. Grundriß einer allgemeinen Theorie. Frankfurt a. M.: Suhrkamp.
Luhmann, N. (1997). Die Gesellschaft der Gesellschaft. Frankfurt a.M.: Suhrkamp.
Maturana, H. R. (1978). Biology of language: the epistemology of reality. In G. A. Miller & E. Lenneberg (Eds.), Psychology and Biology of Language and Thought. Essays in Honor of Eric Lenneberg (pp. 27-63.). New York: Academic Press.
Maturana, H. R. & F. Varela (1980). Autopoiesis and Cognition: The Realization of the Living. Boston: Reidel.
Nelson, R. R. & S. G. Winter (1982). An Evolutionary Theory of Economic Change. Cambridge, MA: Belknap Press of Harvard University Press.
Parsons, T.S. (1968). Interaction: I. Social Interaction. In: D. L. Sills (Ed.), The International Encyclopedia of the Social Sciences (Vol. 7, pp. 429-441). New York: McGraw-Hill.
Parsons, T. S. (1963a). On the Concept of Political Power,. Proceedings of the American Philosophical Society 107(3) 232-262.
Parsons, T. S. (1963b). On the Concept of Influence. Public Opinion Quarterly 27 (Spring), 37-62.
Rosen, R. (1985). Anticipatory Systems. Oxford, etc.: Pergamon Press.
Urry, J. (2003). Global Complexity. Cambridge, UK: Polity.
[1] Amsterdam School of Communications Research (ASCoR), University of Amsterdam, Kloveniersburgwal 48, 1012 CX Amsterdam, The Netherlands. loet@leydesdorff.net ; http://www.leydesdorff.net
[2] Centre for Hyperincursion and Anticipation in Ordered Systems, CHAOS asbl. Institute of Mathematics B37, University of Liège, Grande Traverse 12, B-4000 Liège, Belgium. Daniel.Dubois@ulg.ac.be ; http://www.ulg.ac.be/mathgen/CHAOS
[3] The psychological system is expected not only to process meaning, but also to generate identity. Unlike the social system, the dynamics at this level can under certain conditions become historically fixed.
[4] The programs can be adapted for higher or commercial versions of Basic, and for other languages. In Visual Basic the programs formulated in this paper can be imported as subroutines.
[5] In order to prevent overflow while running this model, values of the parameter a larger than 4 are reset to a = 4 (in line 2).
[6] The subsystem entertaining the model of the system in the present state can be considered as an endogenous observer of the system’s history. Endogenous means here that this observer remains a result of the network in which the observer effect is generated (Maturana, 1978). One can consider this observer as an incursive subroutine of the complex system. Note that the metaphor is still biological because this observer is not positioned refexively in a (next-order) communication among observers (Leydesdorff, 2000; Maturana & Varela, 1980). The observer remains completely embedded and follows the development in the observed system.